
| 製品情報 | サポート | 会社情報 | お問合せ | ブログ | |
| 適格請求書発行事業者登録番号 T6-4500-0100-1946 | |||||
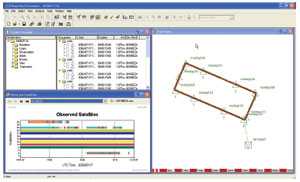
EzSurv はカナダのモントリオールに拠点を持つVGI Solutions社が開発・販売している1周波/2周波用GNSS(全地球航法衛星システム)用後処理ソフトウェアです。EzSurvは各メーカーのGNSS製品に対応しており、GNSS受信機から記録した生データを後処理することにより位置精度を向上させます。
EzSurvにはGNSSデータファイルをEzSurvに読み込ませワンアクションで適切な基地局情報を探索し(日本国内全基準点対応)、自動的に後処理を行うAuto Processingモードと、後処理に関するシチュエーションをユーザー自ら詳細に行うManual Processingモードがあり、様々なユーザーリクエストに対応することができます。
『後処理』とは...
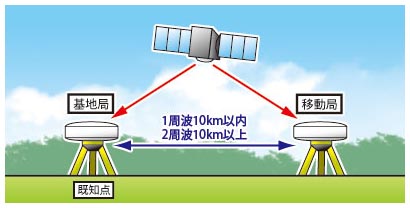
『後処理』とは、GNSS受信機で計測したデータを、正に、後に再処理することで位置の精度を向上させる、という工程を言います。
通常は、既知点に基地局用GNSS受信機を、計測対象の地物の測定に移動局用GNSS受信機を配置し、双方が同じ時間帯で受信を開始し、移動局受信機はそのまま対象を測定します。
このように2台の受信機で同時期のGNSS信号を受信することにより、お互いの差分より位置精度を向上させる処理が『後処理』です。
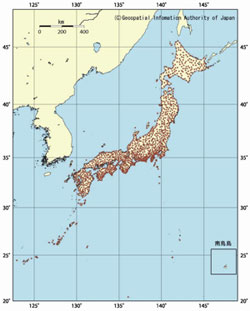
すると基地局と移動局の2台のGNSS受信機が必要と思われますが、日本国内においては、全国に基地局となる電子基準点が国土地理院GEONETにより整備され一般に開放されているので、このデータを基地局データとして後処理を行えば、1台のGNSS受信機だけで全国で後処理が可能です。
参考:国土地理院GEONET計測方法
EzSurvは次の計測データに対応しています。
後処理の基準になる基地局データを測定する方法。移動局も同じ時間帯に計測する必要があります。
観測点において、GPSアンテナを固定し長時間測定する方法。基線解析や位置の精度を高めたい場合に行います。計測時間は数分から約1時間となり、概ね長い時間計測するほど精度が良くなります。
移動しながら位置を測定する方法。
キネマティックモードと同じですが、基地局に備え付けた専用ガイドバーによって観測時間を大幅に短縮します(基地局の設置とEzFieldソフトウェア必要)。
ソフトウェアバージョン
EzSurvは要求される後処理精度によって3種類のバージョンと、それぞれにGLONASS後処理オプションが用意されています。
| 後処理内容 | EzSurv Lite | EzSurv L1 | EzSurv L1,L2 |
| 1m以上/30cm以上 | ● | ● | ● |
| スタティックFIX解 | ● | ● | |
| On the fly L1 | ● | ● | |
|
スタティック L1/L2 FIX解 | ● | ||
| On the fly L1,L2 | ● | ||
| GLONASS対応 | ●※ | ●※ | ●※ |
後処理精度
| 受信機 |
キネマティック 処理 |
スタティック 処理 | セミキネマティック処理 |
OnTheFLY 処理 |
| 1周波 |
1m以内 (※1) 30cm以内 (※2) | 1cm (※3) | 数cm (※4,5) | 2cm (※6) |
| 2周波 | N/A | 1cm (※7) | N/A | 2cm (※8) |
| ※1 | 水平精度にて。PDOP6以上、衛星5機、5〜10分の続けてのトラッキングが行える測位環境。またマルチパスや電離層状態の影響が精度に影響を及ぼします。基地局からの距離に応じて5ppmの誤差を含みます。 |
| ※2 | 水平精度にて。PDOP6以上、衛星5機、15〜20分の続けてのトラッキングが行える測位環境。またマルチパスや電離層状態の影響が精度に影響を及ぼします。基地局からの距離に応じて5ppmの誤差を含みます。 |
| ※3 | 水平基線精度にて。PDOP6以上、衛星4機、15〜30分の続けてのトラッキングが行える測位環境またマルチパスや電離層状態の影響が精度に影響を及ぼします。基地局からの距離に応じて1cm±2ppmの誤差を含みます。 |
| ※4 | 連続的なL1 コード波、キャリア派等の受信が必要です。 |
| ※5 | EzFieldソフトウェアを適切に使用した場合です。 |
| ※6 | 水平精度にて。PDOP6以上、衛星5機、45分の続けてのトラッキングが行える測位環境。基地局から10km以内。またマルチパスや電離層状態の影響が精度に影響を及ぼします。基地局からの距離に応じて2cm±2ppmの誤差を含みます。 |
| ※7 | 5〜10分でcm精度。水平精度は1cm±1ppm含みます。 |
| ※8 | PDOP6以上、衛星5機、約30秒続けてのトラッキング。またマルチパスや電離層状態の影響が精度に影響を及ぼします。基地局からの距離に応じて2cm±2ppmの誤差を含みます。 |
対応するデータ形式、またはGNSS受信機
| Rinex | バージョンv2.10 |
| Hemisphere GPS | すべての受信機 |
| Magellan | DG14、ProMark 500 |
| NavCom | すべての受信機 |
| Novatel | すべての受信機 |
| Septentrio | すべての受信機 |
| Ublox | TIM-LH、LEA-4T、LEA-5T |
動作環境
EzSurvは次の環境で動作します。
| ハードウェア | Windowsが動作するPC |
| CPU | Pentium1GHz以上 |
| HDD | 1GB以上の空き推奨 |
| メモリ | 1GB以上推奨 |
| OS |
Microsoft Windows Vista, Windows 7, Windows 8, Windows 8.1, Windows 10, Windows 11 |
| USB | SafeNetハードウェアキー |
| ネット環境 | ソフトウェアの更新や基地局検索に必要 |
オプション
追加情報
